Partes de un Robot
Partes de un Robot
1 : Unidad de control

Si estás leyendo este post porque de alguna forma te interesa el mundo de la robótica, seguro que ya tienes una idea de qué es la unidad de control de un robot.
La unidad de control, realiza principalmente 2 acciones:
Está «pendiente» de las señales se reciben a través de los sensores del robot (luz, corriente eléctrica, calor, etc.).
«Ordena» a los actuadores del robot (motores, luces, etc.) que realicen acciones.
De forma muy resumida y general, un robot funciona así:
Cuando pones en marcha el robot, se empiezan a realizar las instrucciones que están almacenadas en la memoria de la unidad de control.
Si el robot dispone de algún tipo de sensor, la unidad de control comprueba qué datos llegan.
Teniendo en cuenta los datos recibidos y las instrucciones del programa, la unidad de control ejecuta, o no, alguna acción determinada.
Este ciclo se repetirá mientras el robot esté en funcionamiento. Puede ser un ciclo cortísimo, por ejemplo, comprobar una vez por segundo la temperatura de un motor para saber cuándo aumenta peligrosamente y pararlo; o puede ser un ciclo muy largo realizando muchas acciones complejas.
La unidad de control siempre ejecuta el ciclo que tiene programado en su memoria.
Debes tener en cuenta que una acción no tiene por qué repetirse. Puedes programar un robot para que ejecute una acción una sola vez.
¿Qué unidad de control puedo usar?
No voy a reinventar la rueda y animarte a construir tu propia unidad de control, aunque puedes hacerlo si quieres y en Internet encontrarás mucha información al respecto.
Lo más fácil para empezar es usar placas electrónicas ya montadas. La más usada, sin duda es Arduino/Genuino. Aunque existen muchas versiones y tamaños, la reina indiscutible es Arduino UNO.

Se programa de forma relativamente sencilla, tiene bastantes puntos de conexión para sensores y actuadores y es compacta y manejable.
Sin duda, Arduino es ideal para comenzar en robótica. Y es gratis la instalacion y puedes hacer donaciones las cuales ayudan a mantener el sitio y la aplicacion de Arduino actualizable y
Pero hay más opciones, aquí van un par de ejemplos:seguro para toos, ya si quieres poner a prueba tu programacion se pueden comprar las placas de Arduino( las cuales pueden ser Macro, Mega con procesador 1040 o Mega con procesador 2056, uno ,Mini, ect) y que tambien se venden su kit de inicio que viene con un teclado, una placa arduino Uno, un sernsor de proximidad, un Joystick,una pantalla LCD, resistencias, potenciometro,etc.
Placa Zum, de Bq. Está basada en Arduino UNO, con algunas mejoras respecto a ésta, aunque la diferencia de precio es considerable.
Raspberry Pi. Es un microordenador en toda regla (se le pueden conectar teclado, ratón, monitor, etc.), pero nada impide usarla como unidad de control de un robot gracias a su reducido tamaño y precio razonable.
Imagen de placa Raspberry PI
2 : Motores
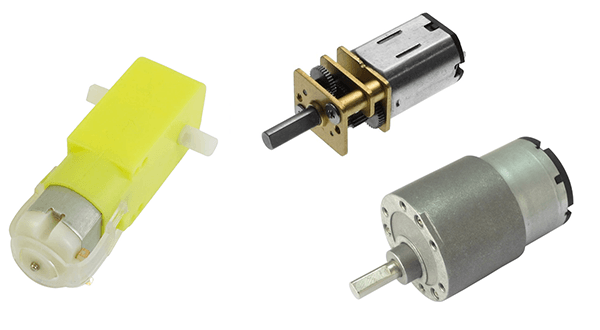
También se conocen como motores CC o DC. Son los motores más sencillos de conectar y usar para robots de iniciación. El voltaje para aplicaciones de pequeños robots suele estar entre 3 y 12 voltios, aunque hay motores que trabajan con otros valores.
Precisamente variando el voltaje que se les aplica se puede controlar la velocidad a la que giran estos motores . Nunca debes usar más voltaje del que admite el motor, ya que se quemará.
Solamente necesitamos 2 cables para conectar un motor CC. Uno es el polo positivo, marcado con el símbolo «+» y normalmente es de color rojo; y el otro es el polo negativo (también llamado tierra), marcado con «-» y habitualmente de color negro. Si intercambias la conexión de los cables, el motor girará en sentido contrario.
Al ser motores relativamente pequeños, no generan demasiada fuerza (lo que se llama par motor). Para conseguir más fuerza con el mismo motor, algunos de ellos vienen con una reductora incorporada. Esta reductora no son más que una serie de engranajes.
A cambio de conseguir mayor par, la velocidad final siempre será menor que la velocidad inicial a la que gira el motor. Normalmente esto no es un problema ya que la velocidad de giro de estos pequeños motores es tan alta que no tiene demasiados usos prácticos, excepto para hélices y poco más.
Más información sobre estos motores: información sobre motores de corriente continua
3 : Sensores

Si piensas que los sensores de un robot son similares a los sentidos humanos, no vas desencaminado.
Existen gran cantidad de sensores, pero todos tienen una finalidad: percibir «algo». Ese «algo» puede ser muy variado: un contacto, una fuente de luz o gas, campos magnéticos, un movimiento, etc.
Afortunadamente para los que se inician en el mundo de la robótica, la primera toma de contacto con los sensores no es difícil.
Eso sí, mi consejo es que vayas probando los sensores uno por uno, antes de conectar el resto de componentes a la unidad de control. Así, como no habrá otros elementos que compliquen las conexiones, podrás entender el funcionamiento de cada tipo de sensor.
Funcionamiento básico
En general, un sensor funciona reaccionando de alguna forma a un estímulo externo. La reacción que tienen muchos sensores es cambiar su resistencia al paso de corriente aunque hay otras formas de funcionamiento.
De esta forma, si conectas el sensor a la unidad de control y la programas, por ejemplo, para que compruebe el valor de la resistencia del sensor cada cierto tiempo, puedes ejecutar una acción determinada dependiendo de los valores que detecta la unidad de control.
Los datos de funcionamiento de cada sensor hay que consultarlo en su hoja de características (datasheet) o en la página web de los fabricantes.
Los sensores más fáciles de usar, pero que permiten una gran interacción del robot con todo lo que le rodea son:
Presión o de contacto.
Distanciómetros, para medir distancias.
Sensores de luz.
Presencia o movimiento.
Inclinación.
Temperatura.
4 : Fuente de energía

Sin energía, tu robot no hará gran cosa.
Para suministrar energía al robot lo más sencillo y barato son las baterías o pilas. Puedes construir un micro-robot que funcione con una pila de tipo botón, pero para comenzar lo más facil y asequible para tu bolsillo serán las pilas de 1,5 y 9 voltios.
Juntando varias pilas de 1,5 V en serie (el polo negativo de una se conecta con el polo positivo de la siguiente o viceversa), puedes conseguir el voltaje que necesites.
Pero también hay que tener en cuenta la cantidad de corriente que necesite tu robot. No puedes pretender alimentar tu flamante robot de 4 motores, 2 servos, 5 sensores y la unidad de control con 4 pilas de tamaño AAA, y encima pretender que funcione 2 horas seguidas. En general, para pilas o combinaciones de un mismo voltaje, mayor tamaño significa mayor tiempo de funcionamiento.
Calcular la alimentación necesaria para un robot se sale de las pretensiones de este artículo.
Un detalle que a veces puede volver loco al principiante, es que los motores pueden introducir «ruido eléctrico» en un circuito. Y no me refiero al sonido de los motores. Hablo de ondas electromagnéticas que pueden afectar a otros componentes del circuito. Esto se nota en comportamientos extraños o caóticos del robot.
Si al poner en marcha tu robot ves que «hace lo que le da la gana», quizás deberías poner dos fuentes de energía separadas: una para motores y otra para los sensores y la unidad de control.
Resultado de imagen para fuente de energia de un robot
5 : Placas de prototipado de circuitos

¿Qué son y para qué sirven?
Se trata de un bloque de plástico con orificios en su superficie. En estos orificios se insertan los componentes electrónicos y cables, haciendo contacto con unas láminas metálicas que hay en el interior. Como cada fila de orificios comparten una misma lámina metálica, si insertamos otros componentes en la misma fila hacen contacto eléctrico.
Las placas para prototipado (conocidas también como protoboard o breadboard) son muy útiles, diría imprescindibles, cuando empezamos en electrónica o robótica. Nos permiten conectar entre sí elementos eléctricos o electrónicos rápidamente, sin emplear soldadura ni tornillos. Eso sí, hay que tener en cuenta que no están diseñadas para altas intensidades de corriente o alto voltaje.
Comentarios
Publicar un comentario